モードドライバー第5回(まとめ)
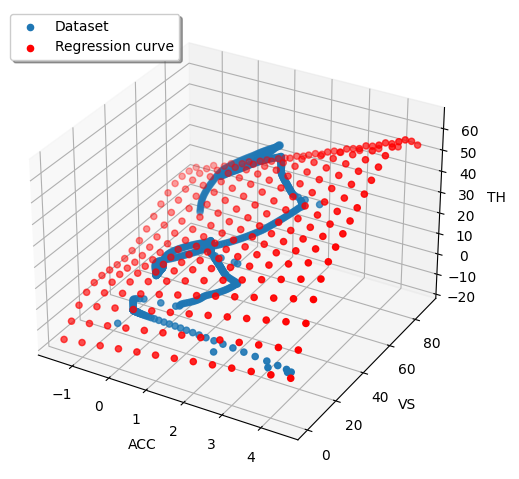
pythonのsklearnとMatlab/Simulinkを連携してサポートベクタ回帰をためしてみました。結果モード燃費の速度偏差±2km/hというのは若干外れたもののかなり性能の良いモードドライバ(ゲインスケジューリングマップ)を作ることができました。
余力があったら修正してどこかで公開したいと思います。では以下にまとめます。
まとめ
・pythonとMatlabを連携して使うことができた。
・簡単な小規模モデルや例題を用いながら確実に進めることができた。
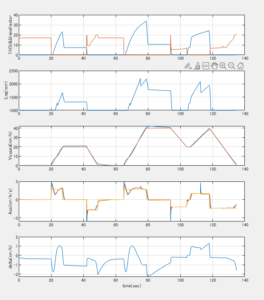
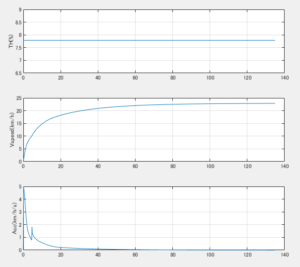
・オープンループでもモード走行概ね満足できた。
・本作業は結局アクセルマップの設計手法といえる。
・サポートベクタマシンの勉強になった。
・アクセルマップは車速毎に目標加速度とアクセルの関係を作成するというほぼ予想通りの結果
今後の課題
・ニューラルネットワークでも試したい
・アクセルブレーキ同時踏みを解決したい
・学習パターンを巡行(アクセル一定)状態で長めに取りたい(巡行時誤差の解決)
・アクセルにもフィードバックを追加したい。(精度向上)
・学習にAT変速段も追加して評価してみたい。
こんな感じです。
ということでまた何かあったら記述したいと思います。