モードドライバー第4回(その3)
STEP5.Simulinkでモード走行。(ブレーキは車速フィードバック)
評価用にスコープデータやToFileブロックの入力を付け加えてみました。こんな感じのシミュレーション結果が得られました。
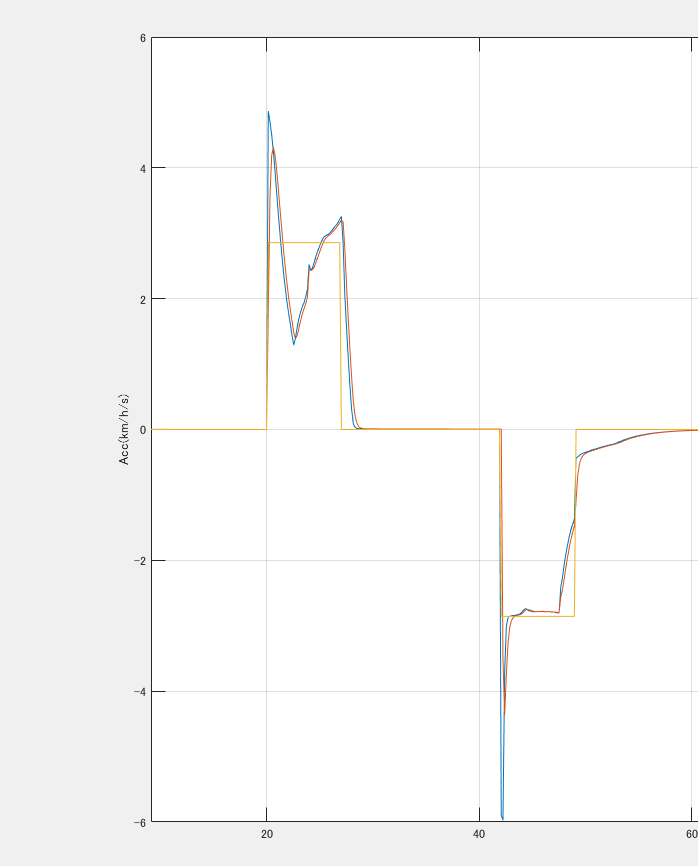
一番上の赤がブレーキ、青がアクセル、二番目がエンジン回転数、3番目が目標車速と実車速、4番目が目標加速度と実加速度、そのフィルターしたもの、5番目(一番下)が偏差です。ブレーキのみ速度フィードバックした結果です。
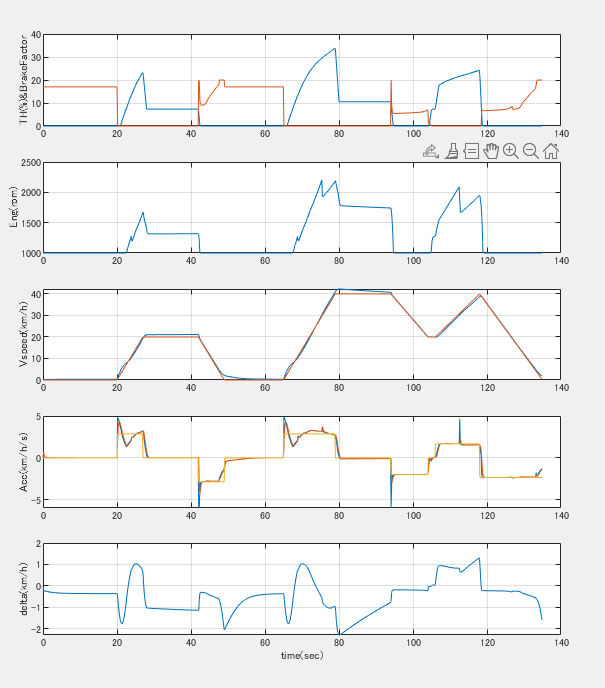
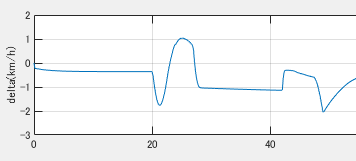
5番目の偏差見ると概ね±2km/h以内を満たしています。すごくないですか?
モード走行パターンの形状をそのままアクセルパターンにみたてて135秒間を適当に分割して学習しただけです。よく見るとアクセルとブレーキ切り替え時にを若干ですが同時に踏んでいる部分あったりブレーキパターンが急すぎたり、それとこれアメ車の大排気量の車でエンジントルクデカすぎるのか知りませんがエンジン回転数がアイドリングの1000回転から2200rpmくらいの範囲で完結しているのがきになりますが。モードドライバーをサポートベクタマシンで簡単に実現できることわかりました。
STEP6.評価
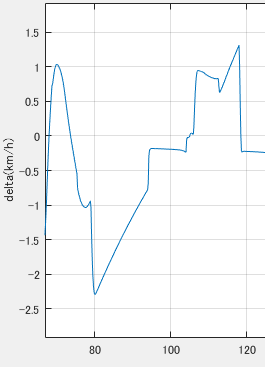
評価基準としては交通安全環境研究所の資料にあるように±2秒間で合計2秒以内というスペックになっていますが80秒当たりのところで速度が2km/h以上高く、速度のグラフ見ても加速終えて40km/h巡行に移行するときにオーバーシュートしているのがわかります。ほんの少しだけなので速度フィードバックかければ大丈夫かなという印象です。
https://www.naltec.go.jp/publication/regulation/fkoifn0000000ljx-att/fkoifn00000060q2.pdf
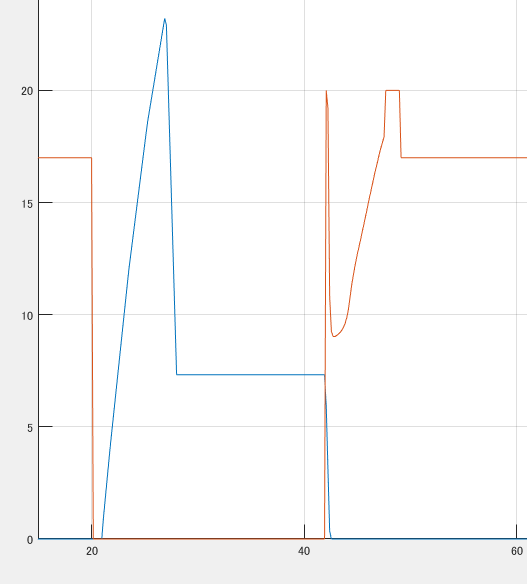
まず最も気になるところです。図中赤線がブレーキ、青線がアクセルですがペダル操作は通常片足だけで操作する場合はアクセルとブレーキを同時に踏むことはありません。40秒少し過ぎたところでは減速フェーズになりますが同時に踏んでいます。これはブレーキ条件のみを設定しているためでブレーキ条件に”アクセルを放してから踏む”を追加する。もしくはアクセル操作条件がONになった場合アクセルをOFFにするという条件を付ければ解消できそうです。
つぎに同じ部分でのブレーキですが瞬間的に強く踏み込んでいったん緩めたのちにブレーキを強く踏んでいます。これはアクセル、ブレーキを同時に踏んでいることによるものだと思われるので前述の改修できれば問題解決できるかと思います。次に20秒付近のゼロ発進では逆に1秒程度のすき間があります。これは目標加速度に対しクリープ力が勝っているためアクセルを踏む必要がないという部分になっています。
実際の車両だとなかなかイメージわきませんがシミュレーション場ですので特に問題ないかと。あくまでも仮想的な車両なので。また実際のドライバはアクセル、ブレーキを踏みかえる時間があるのでこれくらいが自然に見えていいのかもしれません。
次に加速度です。20秒付近ではゼロ発進ですが、目標が2.5くらいのところ実際は5近くまで到達しています。数秒かけて目標値をかなり下回っています。これ実際の自動車であれば大きな衝撃となり問題となりそうです。トルクコンバータによるクリープ力高すぎですね。
さらに40秒少し超えた付近ではマイナスの加速度が6くらいまで到達しています。これはアクセルとブレーキを同時に踏んでいる区間であることと、ブレーキのフィードバックゲインが高いのかもしれませんね。実際の車両では問題になりそうですが今回はアクセル操作のサポートベクタ回帰ということで。
車速の目標値との偏差につきましては本来停止状態では0km/hとなり誤差があってはいけませんが、モデルの都合上この様に発生してしまいました。これもご勘弁いただくとして20km/h巡行時は-1km/hの偏差がコンスタントに続いています。アクセル開度、エンジン回転数、車速もほぼ一定。つまりアクセル開度とそれ以外の条件がうまくバランスしていることを意味しています。サポートベクタマシン優秀ですね。しかし80~90秒付近の40km/h巡行時にはアクセル開度は一定のものの車速がいったんオーバーシュートし徐々に目標値に近づいていることがわかります。20km/hの時との大きな違いの一つは走行抵抗です。走行抵抗は車速の2乗に比例するため、もう少し巡行状態を長くすれば40に近づく可能性もあれば35くらいに下がるかも知れません。そういう意味では後ほどアクセル開度固定しオープンループで試して再評価した方が良いと思います。
評価としては人間の感覚からするとずれている部分はあるが、オープンループでもかなり性能の良いモードドライバではないかと思います。ただしアクセルブレーキ同時踏みと40km/h巡行時は修正ののち再評価の必要ありといったところです。それにしても、これハンドチューニングでゲインスケジュールマップ作るの非常に大変なのでホントにすごいと思います。